w16_exam3 <<
Previous Next >> Final Report
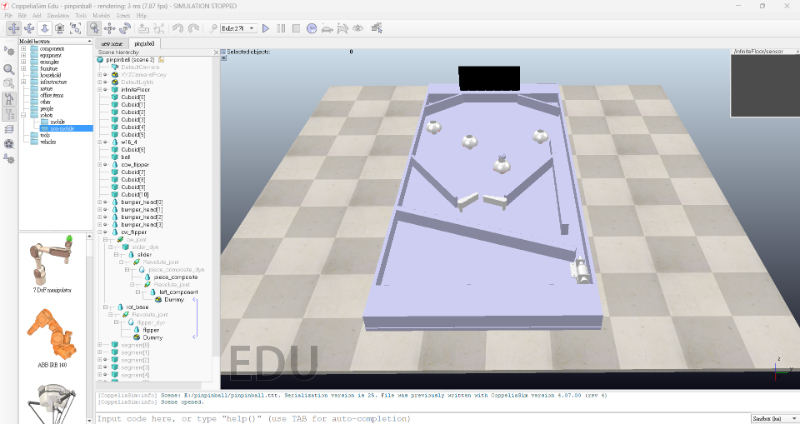
Pinball
/downloads/pinball.ttt
# pip install pyzmq cbor keyboard
from coppeliasim_zmqremoteapi_client import RemoteAPIClient
import keyboard
# Connecting to the CoppeliaSim server
client = RemoteAPIClient('localhost', 23000)
print('Program started')
sim = client.getObject('sim')
# Get the handles for the sliders (prismatic joints)
cw = sim.getObject('/cw_joint')
ccw = sim.getObject('/ccw_joint')
slider = sim.getObject('/Prismatic_joint')
# Starting the simulation
sim.startSimulation()
print('Simulation started')
# Main control loop
def main():
# Keep running until simulation is stopped
while True:
# Controls for cw and ccw joints
if keyboard.is_pressed('l'): # Move cw slider to -0.25 position
print("l is pressed")
sim.setJointTargetPosition(cw, -0.25)
if keyboard.is_pressed('p'): # Reset cw slider to the original position
print("p is pressed")
sim.setJointTargetPosition(cw, 0.0)
if keyboard.is_pressed('w'): # Move ccw slider to -0.28 position
print("w is pressed")
sim.setJointTargetPosition(ccw, -0.28)
if keyboard.is_pressed('s'): # Reset ccw slider to the original position
print("s is pressed")
sim.setJointTargetPosition(ccw, 0.0)
# Controls for the Prismatic_joint
if keyboard.is_pressed('E'): # Move slider to -0.15 position
print("E is pressed")
sim.setJointTargetPosition(slider, 0.20)
if keyboard.is_pressed('D'): # Reset slider to the original position
print("D is pressed")
sim.setJointTargetPosition(slider, 0.0)
# Stop the simulation
if keyboard.is_pressed('t'): # Stop the simulation
print("t is pressed - stopping simulation")
sim.stopSimulation()
break
# Start the main control loop
main()w16_exam3 <<
Previous Next >> Final Report